
複数の移動ロボットによる 協調的な行動 情報共有に基づく お片づけロボットのシステム開発 Ppt Download
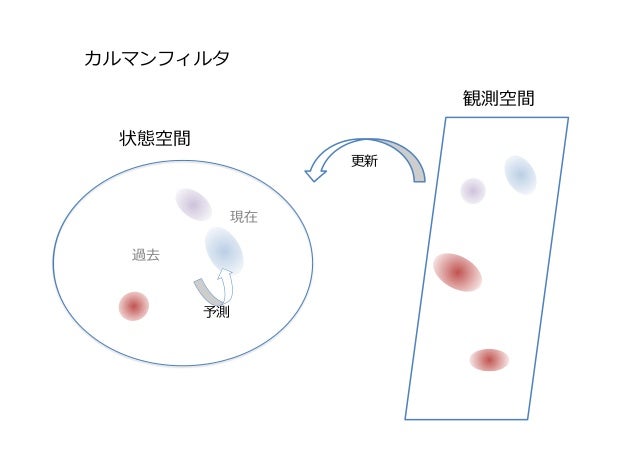
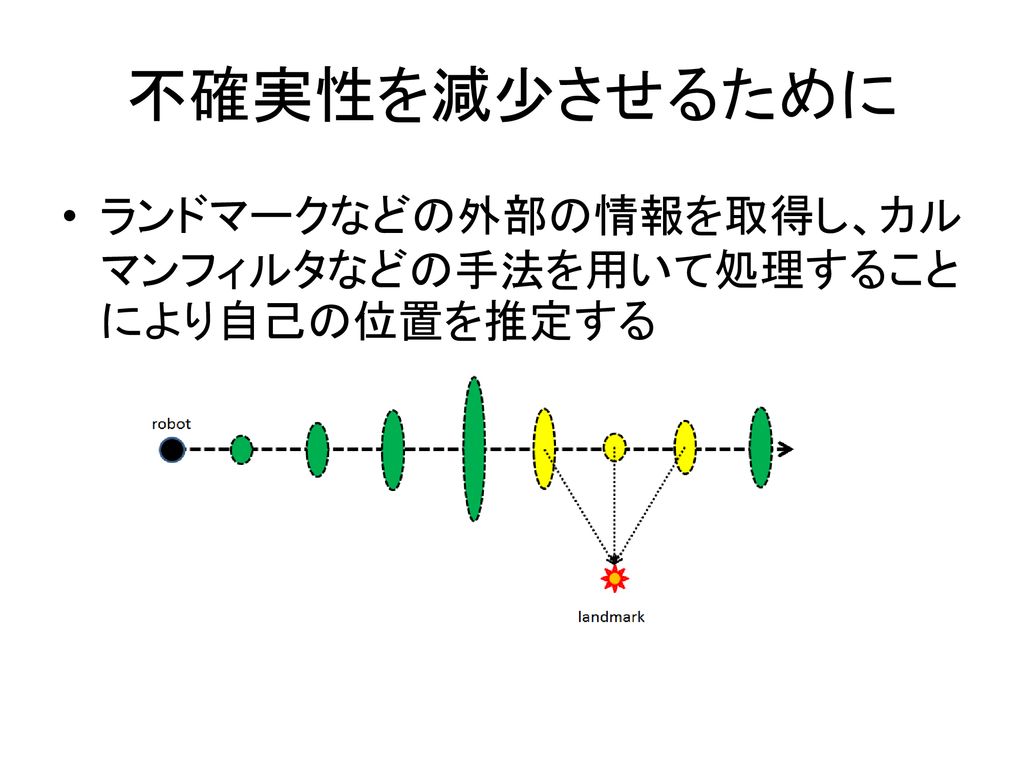
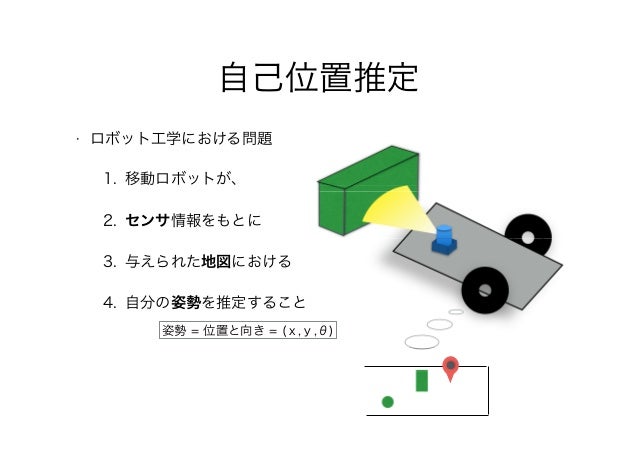
確率的自己位置推定

拡張カルマンフィルタによる自己位置推定動作の可視化 Qiita

ソウル大学校ら 線形カルマンフィルタを用いてグローバル平面マップを生成するslam法を発表 Arの応用も実証 Seamless

Qiitaの図
動物とロボットの空間ナビゲーション
拡張カルマンフィルタによる自己位置推定動作の可視化 Qiita
自己位置推定フィルタ開発のための擬似センサデータ出力ノード Ros Myenigma

確率的自己位置推定
2
カルマンフィルタにおける誤差楕円の計算方法 Myenigma

Tags:
Archive





